-
Compact Multiple Functional Integrated Medical Robotic End-Effector for Neurosurgery
Zhang, Yinjia; Li, Weihan; Wang, Haotian; Ma, Xudong; Yang, Qian; Tang, Jie; Hou, Yuanzheng; Hu, Yida; Li, Changsheng; Liu, Wenyong; Wang, Junchen; Su, Baiquan
-
A Bone Tumor Boundary Extraction Method Incorporating Envelope and Responsive Region for Robot-Assisted R0 Resection
Liu, Yanwen; Fan, Daoyang; Liu, Weifeng; Liu, Wenyong
-
Hair Direction Detection
Ba, Peng; Wang, Pengyi; Wu, Hongde; Yang, Qian; Feng, Yongqiang; Wang, Junchen; Hu, Yida; Li, Changsheng; Liu, Wenyong; Kuang, Shaolong; Su, Baiquan
-
Methodology on Robot-Based Complex Surface Processing Using 2D and 3D Visual Combination
Wu, Haodong; Zou, Ting; Burke, Heather; King, Stephen; Burke, Brian
-
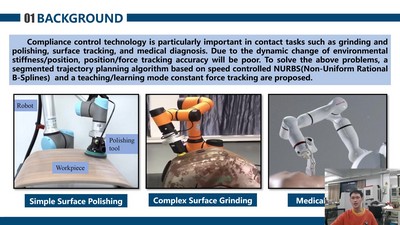
A Constant Force Tracking Strategy for Complex Surface Robots Fused with NURBS Speed Planning and Teaching/Learning Mode
Duan, Jinjun/Cui, Kunkun/Guo, An/Wang, Lingyu/Bin, YiMing/Wan, Minhong/Huang, Qiulan
-
MSD-YOLO: A Novel Method for Detecting Microscopic Surface Defects in Metal Spray-Painted Thermal Mugs
Yan, Zhibo; Zhang, Teng; Liu, Yu; Li, Rui; Wang, Dongyun
-
Res2net Based Siamese Network for Object Tracking Via Efficient Multi-Scale Attention and Border Region Reppoints
Yuan, Shuai; Geng, Jinyu; Dou, Huize
-
Combining VLM and LLM for Enhanced Semantic Object Perception in Robotic Handover Tasks
Huang, Jiayang; Limberg, Christian; Arshad, Syed Muhammad Nashit; Zhang, Qifeng; Li, Qiang
-
Research on Enhanced YOLOv8 Gesture Recognition Method for Complex Environments
Yuan, Shuai; Kong, Xiangjie; Zhang, Shuai